Les caméras embarquées, c’est sympa, ça donne souvent de belles images, mais ce n’est pas du direct.
L’an passé j’avais testé un système FPV analogique au plus économique … 50€ pour une caméra avec un émetteur 5.8Ghz et un récepteur connecté en OTG sur le smartphone … sympa, mais la qualité d’image très bof et la stabilité du signal très aléatoire, et aucun réglage du point de vue.
Les systèmes digitaux sont de leur coté très couteux, et propriétaires. On ne peux pas mélanger Caddx et DJI, c’est l’un ou l’autre, et le casque coute rapidement plus de 200€ si on compte ajouter le head tracking, ce qui fait facilement des budgets de 500€ et plus.
Cependant, il existe une alternative Open Source prometteuse et plus économique, le projet Open IPC. Je n’ai plus l’âge de me lancer dans le DIY aussi, certains constructeurs s’étant associés au projet, j’ai opté pour du prêt à l’emploi avec un Runcam WifiLink 2.
Les composants


Le casque 17€ : j’ai déjà un écran, mon smartphone, donc ce sera des lunettes VR
Le Head Tracking :
_ 3 servos 9g (9€) : 2 pour le gimbal associé au Head Tracking, 1 pour le volant
_ Arduino Nano 33 BLE Sense (45€) : il y a plus économique avec le 33 BLE basique (pas le IOT) mais nécessite de souder un bouton reset et est sensible au magnétisme local
_ un cable audio mono avec jack 3.5 (1€) : assez long pour relier le Arduino à la radio
_ deux câbles USB-A/USB-C + rallonge USB-A (3€) : assez long pour relier les lunettes au powerbank
Une powerbank (0€) : j’ai depuis un moment un 24000mAh dont je ne me sers jamais, ce sera l’occasion
LA RunCam Wifilink2-G (95€) : c’est le gros du budget, le pack se compose de la caméra et son VTX, et d’une double antenne USB-A avec son hub USB-C.
Total du budget, hors radio (DDF-350), powerbank et véhicule que je possède déjà et les impressions : 170€
Choix du véhicule
J’ai une vingtaine de crawlers, du 1/12 au 1/6. Le choix est vaste mais s’est réduit rapidement à 3 véhicules.
Le « Wraith » 2.2, assemblage de pièces aftermarket dites « Wraith », est particulièrement tentant, n’étant qu’une grosse cage métallique … sauf que la visibilité serait finalement très réduite.

Le Wraith 1.9, plus habillé, offre une bonne visibilité mais j’aime bien son thème Star Wars et je ne voudrais pas avoir à le charcuter.

Enfin il y a le ETC MK330 Tracrawler, un mélange de tracteur, de crawler et de cycle-car, au look musclé … la visibilité sur les roues serait top mais la longueur du capot, la nécessité d’ajouter un arceau pour protéger la caméra et le manque de place ne sont pas en sa faveur … en plus il est très loin d’être terminé.

Autre possibilité, ajouter un Axial Capra à la collection. Une fois la cage modifiée, son étroitesse en fait un véhicule de choix … mais je n’ai ni la place ni le budget …
Du coup ce sera le Wraith 1.9 qui va s’y coller … tant pis pour le thème Star Wars.
Préparation
Premier objectif, faire de la place … on retire l’intérieur et tous les éléments décoratifs qui seront mis de coté … okazou.


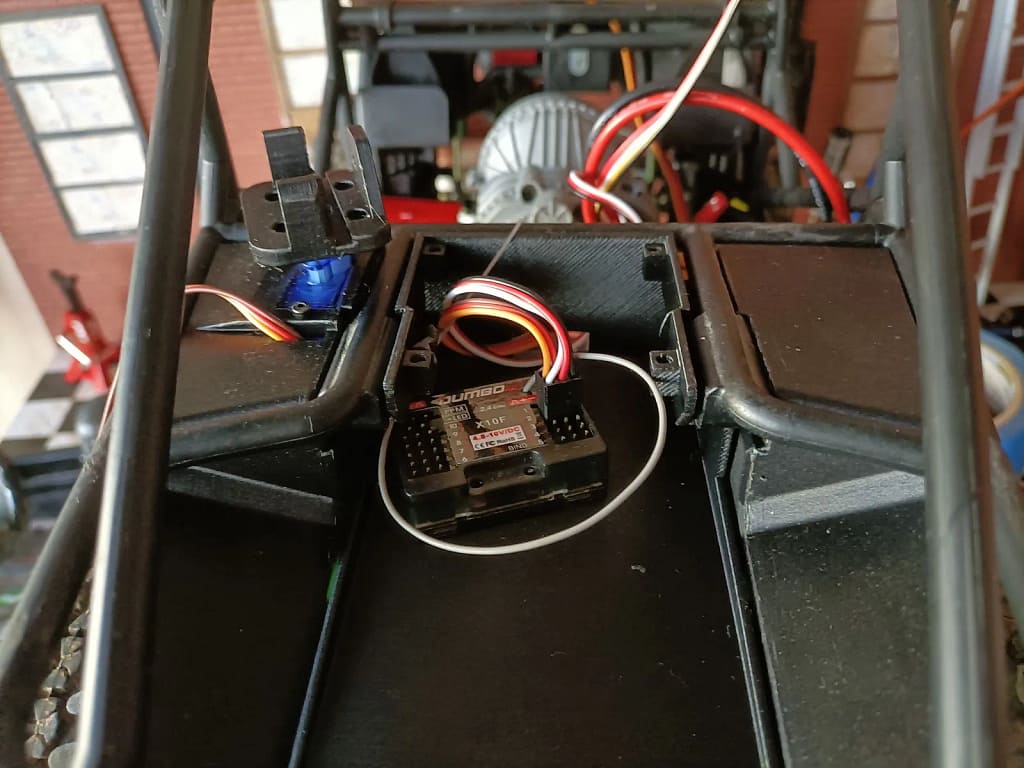
Le servo sera remplacé et l’électronique retirée pour faire place au récepteur de la radio DDF-350 et un Fusion SE 1800.
Fabrication
Et on commence les impressions itératives pour des différents éléments souhaités … comme un poste de pilotage avec le volant qui tourne, et bien sur le gimbal qui suivra les mouvements de tête.



Beaucoup d’essais, de modifications et réimpressions. C’est long, parfois frustrant, il faut faire le tri dans ses idées et parfois interrompre une impression en cours pour partir sur une autre piste, mais c’est le jeu de la conception itérative.
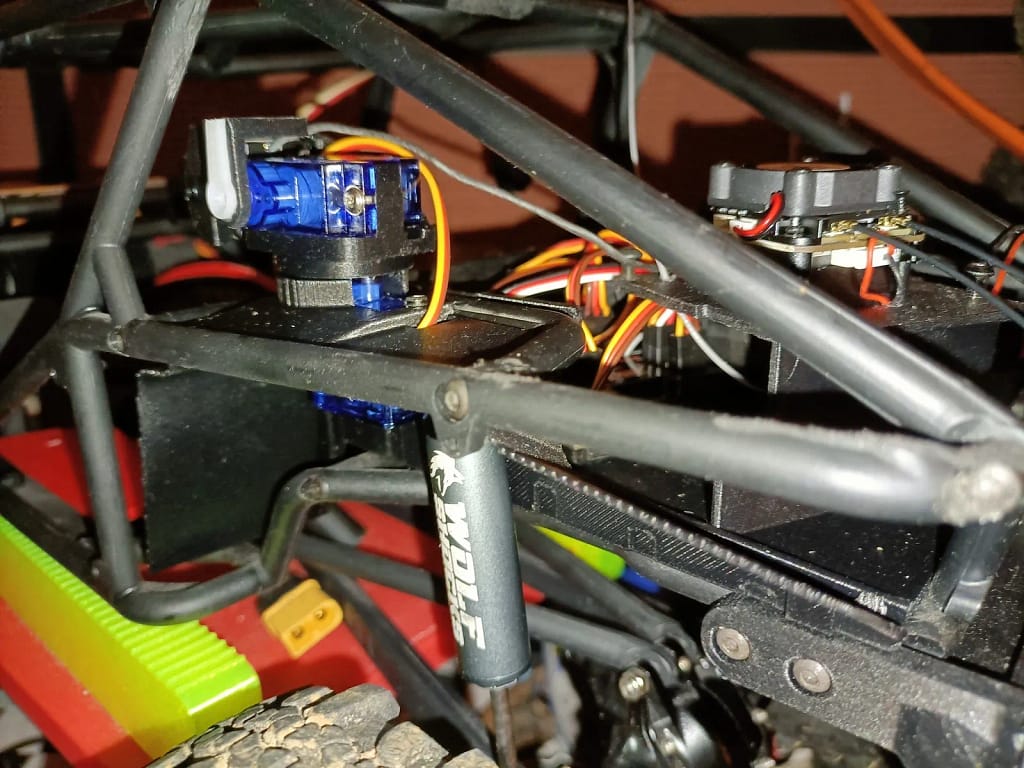
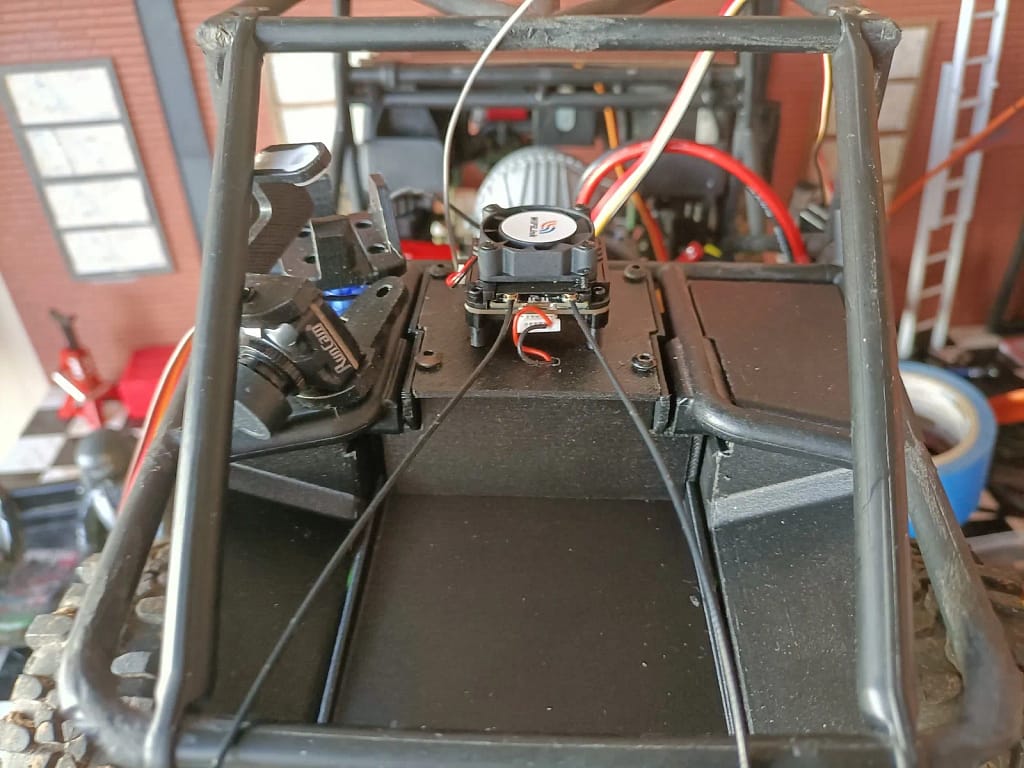
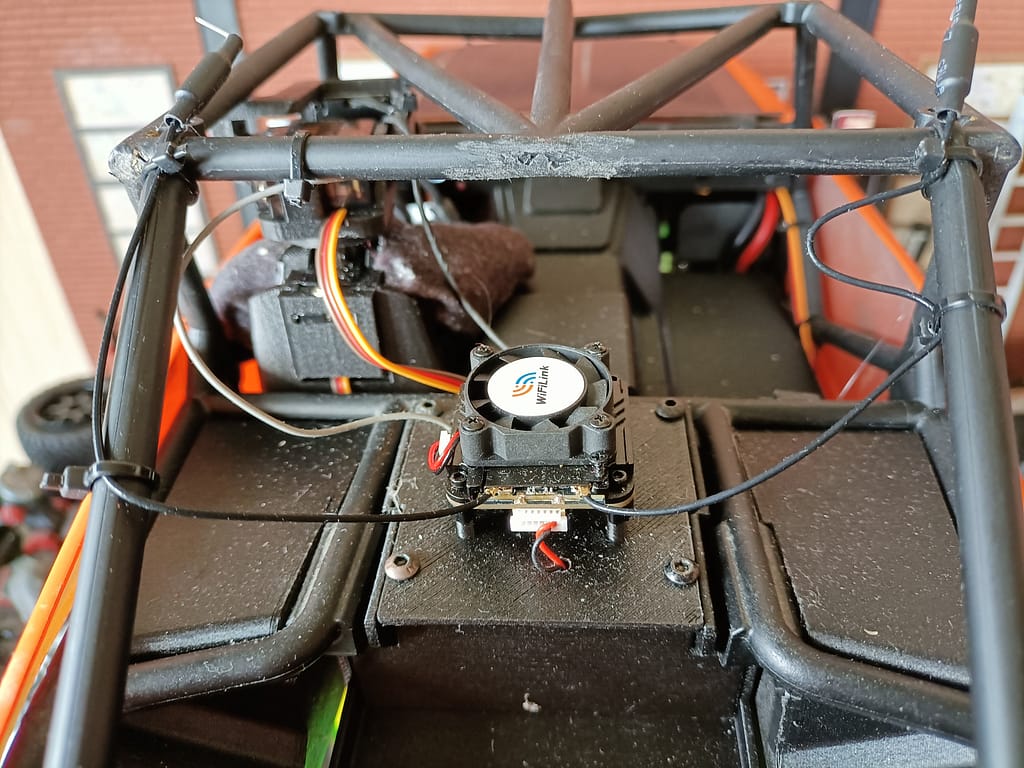
Au final une caméra installée sur son gimbal, lui même intégrè au passage de roue arrière gauche, et un VTX perché au dessus du récepteur, au centre du véhicule … toute l’électronique se retrouve protégée par l’arceau.
Le setup FPV
Parmis les composants du setup, je commence par le Arduino pour le head tracking. Je m’appuie sur un autre projet Open Source : https://headtracker.gitbook.io/head-tracker-v2.2
Si un Nano 33 BLE tout simple peut faire l’affaire et serait plus économique, mais le Nano 33 BLE Sense est plus intéressant. Les seules soudures se limitent aux fils qui relieront le Arduino à la radio via le câble audio mono.

On flashe un nouveau firmware et on passe à sa configuration avec le logiciel créé pour …
Puis validation avec la radio
Et enfin avec le gimbal, après avoir imprimé un boitier qui se fixera sur la bande de serrage des lunettes
Coté lunettes, quelques points de colle et rallonges USB permettent d’installer les antennes et le module de head tracking


Premiers essais et constatations
Un premier essais en intérieur …
… qui permet de constater quelques menus soucis :
_ le servo « pan » a Parkinson … pas bon signe
_ la caméra est trop basse et trop en arrière, la visibilité sur la roue gauche n’est pas aussi bonne qu’espéré
_ le Arduino se coupe au bout de quelques secondes après avoir été branché sur la powerbank
_ le volant, raccordé sur la voie 1 par un cordon Y, tourne dans le mauvais sens.
_ il y a un texte parasite lié à l’absence de controleur de vol.
Rien ne peut être fait pour le Arduino pour l’instant, le problème vient de la powerbank qui coupe la sortie correspondante parcequ’il ne consomme pas assez. Il va falloir un cordon USB-A en Y pour alimenter le Arduino sur le même port que celui qui recharge le smartphone
Le sens de rotation du volant a été réglé en utilisant le mixage prédéfinis pour le 4WS de la radio, avec inversion de la voie 4.
Quand au texte parasite, en modifiant le type de protocole OSD, il disparait.
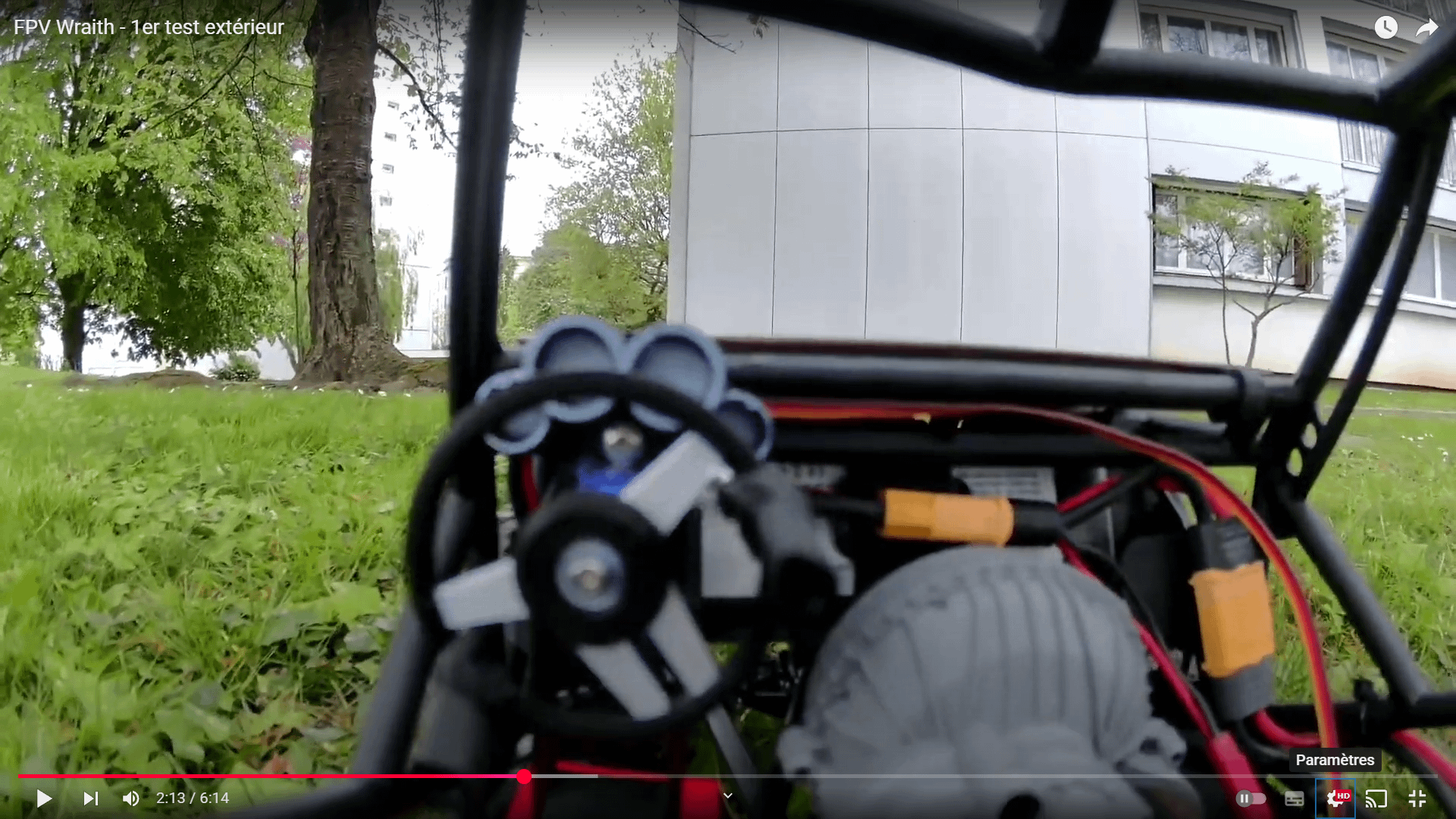
Il est temps de faire un premier essais en extérieur …
… la aussi, quelques constatations.
Tout d’abord, il faut savoir que ma vue est très particulière. J’ai une très forte myopie aggravée par un très fort déséquilibre entre les 2 yeux, ce qui m’a fait hésiter à partir sur un pilotage par lunettes. A l’usage, je n’ai pas la gêne que je craignais mais ma vue à quand même un impact, je ne vois « que d’un oeil », du coup mon champ de vision était réduit et c’est pour ça que la vidéo donne l’impression que je conduit « de travers ». J’ai juste oublié que, dans PixelPilot (le logiciel FPV à installer sur le smartphone), il y a un mode VR qui permet un affichage par oeil au lieu d’un simple affichage plein écran. Il me faudra refaire un essais.
Mais sinon, le résultat est au niveau de mes espérances … la vidéo ci-dessus est en 1080p60fps@4096bps, enregistrée directement sur la carte microSD du VTX, mais le smartphone a enregistré exactement la même chose, sans perte de signal, alors que le véhicule était hors de vue et bien au dessus des antennes, parfois derrière un arbre. Le signal était même assez stable pour faire le tour du noyau de mon immeuble.
Après ce premier essais, une refonte s’impose.
Après plusieurs essais, modifications et créations de pièces imprimées en 3D, la caméra s’est déplacée dans le poste de conduite, à la place de la tête du « pilote ».





Le poste de conduite avec volant synchronisé à la direction a été conservé et une tenue, légèrement adaptée car prévue pour une figurine 1/6, permet d’avoir des bras qui suivent les mouvements du volant.
La première sortie dans cette configuration a commencée avec le module de headtracking et le smarphone installés sur la radio. Plusieurs leçons à en tirer :
_ ne pas conduire en marchant … le headtracking capte tous les mouvements, il faut constamment le réinitialiser.
_ le monde est complètement différent vue du sol, on perds tous ses repères et le véhicule est difficile à localiser
_ la portée en forêt est vite limitée par le relief et les arbres
_ ne pas utiliser le port microUSB pour alimenter le Arduino Nano, il a cassé (du coup pas d’essais avec les lunettes)
_ dans le cas d’un Arduino Nano 33 BLE Sense et d’un ventre prohéminent … éloigner la radio pour ne pas avoir de réinitialisations intempestives du headtracking.
La vidéo est sans coupures pour bien rendre compte de ce que l’on voit sur le smartphone.
@2:45 : les interférences rendent vite la conduite impossible
@4:02 : un tonneau, c’est autrement plus impressionnant au volant
@4:04-4:52 : mouvements de la caméra dus au headtracking sur la radio pendant que je rejoins le Wraith.
L’expérience n’en est pas moins très sympathique et demande a être plus fréquente. La vue avec la carrosserie est un peu limitée mais ce qui est masqué ne manque pas vraiment. Il manque la possibilité de « passer la tête par la fenêtre » mais à cette échelle, il n’y a pas définitivement pas la place pour, sauf éventuellement à sacrifier le servo « tilt » (haut-bas).
mi-Mai 2025
Pour voir le comportement face à des batiments et des sources électriques, j’ai profité de vacances à la campagne.
Le pilotage s’est fait en utilisant FPV4Win sur mon laptop. L’image, plus grande, est bien plus agréable pour la conduite, et la radio peut reposer sur la table, moins fatiguant pour le bras, par contre, aucune possibilité d’enregistrement vidéo depuis l’application.
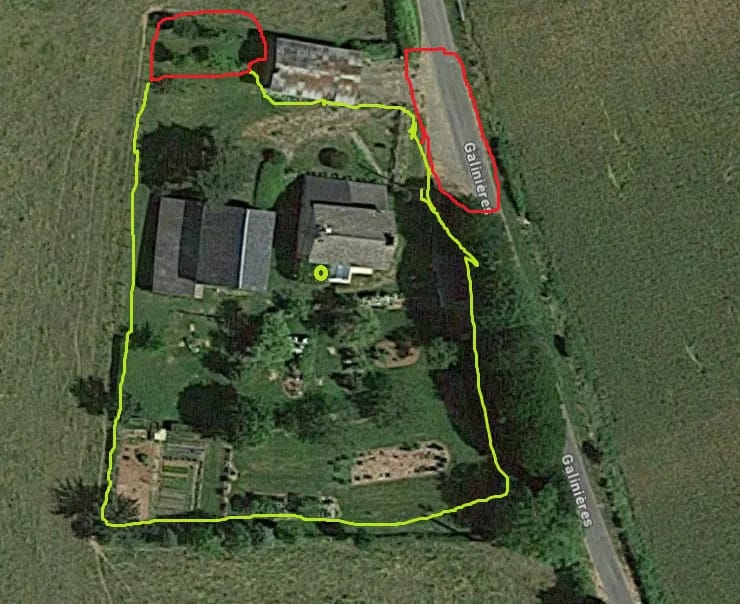
J’ai pu faire le tour de la ferme familiale sans trop de difficultés, seules les zones rouges étaient inutilisables pour la conduite. J’étais positionné sur la terrasse devant la maison. La zone de gauche, avec quelques arbres, framboisiers et groseillers, a rapidement brouillé le signal vidéo mais je n’avais aucun problème pour piloter, avec un peu de patience et de très courtes images pas trop brouillées, j’ai récupéré le contrôle du véhicule. La zone de droite a été plus directe et surprenante, aussitôt passé le portail, le signal vidéo s’est complètement brouillé et j’ai perdu le contrôle du véhicule depuis sa radio … à cet endroit, outre le portail qui représente une masse métallique conséquente, il y a aussi les lignes d’alimentation électrique de la maison, et de la bergerie du voisin un peu plus haut, avec des raccordements anciens qui mériteraient surement d’être rénovés.
J’ai profité d’être la pour aller rouler sur le cailloux de mon enfance … le Rocher du Diable :
Le manque de visibilité de la roue avant rends difficile d’identifier une route sans risques … le pilotage se fait beaucoup à l’aveugle. Heureusement, à part quelques failles que je connais depuis que je sais marcher, la plus grosse difficulté de ce rocher, c’est sa pente … et l’encombrement de sa végétation en cette saison pas encore touristique.
J’ai tenté de suivre le chemin agricole jusqu’au premier signe de perturbation. J’ai pu atteindre 130-140m en quasi ligne droite, avec une végétation particulièrement dense.
1èr Juin 2025 : Premiers essais au Crawler Park du club Sermaise Electro Modélisme
Première constatation à l’activation … énormément de lag, plus de 2s, c’est inconduisible et surprenant … mais ce n’est pas permanent, par moments, le lag disparait complètement. Il y a une antenne relais sur le terrain voisin, surement la cause des perturbations, je ne vois que ça.
L’expérience n’en a pas moins été intéressante et à défaut de pouvoir profiter pleinement d’une conduite immersive, le fait de pouvoir mixer, lorsque le lag était possible, pilotage FPV et pilotage à vue permet d’appréhender le terrain différemment … et d’en avoir une vue difficile à obtenir autrement depuis les points hauts.
